Визначити власні частоти пластини, наведеної на рисунку 80.
Рисунок 80
Розв’язання
Перейдемо від континуальної моделі до дискретної за допомогою подання пластини у вигляді прямокутного скінченного елемента. Такий підхід дозволить обмежитися визначенням перших трьох власних частот коливань конструкції, тому що скінченний елемент буде мати три ступені вільності (переміщення u2, u3, v3).
Кінематичні граничні умови
З урахуванням граничних умов матриці інерції та жорсткості системи набувають вигляду
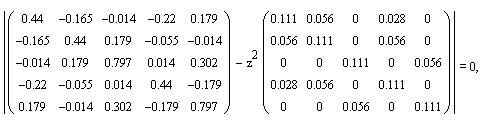
Частотне рівняння набуває вигляду
Зокрема, при отримаємо
де z – безрозмірна частота:
Частотне рівняння в розгорнутому вигляді
Розв’язуючи отримане бікубічне рівняння, знаходимо власні частоти системи в безрозмірному вигляді
Власні форми коливань визначаємо з рівняння
1) перша форма ( ) (рисунок 81а):
2) друга форма ( ) (рисунок 81б):
3) третя форма ( ) (рисунок 81в):
Рисунок 81
Приклад 30
Дослідити власні коливання конструкції, наведеної на рисунку 82, при .
Рисунок 82
Розв’язання
Представляючи конструкцію у вигляді прямокутного скінченного елемента, отримаємо матриці інерції та жорсткості:
Кінематичні граничні умови
Матриці жорсткості системи з урахуванням граничних умов:
Частотне рівняння
де z – безрозмірна частота:
Корені частотного рівняння є власними частотами системи: